Inhaltsverzeichnis
Parameter zur Einstellung der Drehscheibe
Aus der Vielzahl der Konfigurationsvariablen (#defines) hier ein paar wesentliche:
- Einige #defines wie USE_DCC, USE_SOUND, USE_SERIAL_INPUT etc. steuern, was der Sketch alles später an Funktionen bietet, also, ob DCC, Sound und Eingaben über den seriellen Monitor verwendet werden.
- Das #define USE_POTI muss auf 0 gesetzt werden, wenn kein Poti angeschlossen ist, sonst kann es sein, dass die Drehscheibe nach dem ersten Kalibrieren und Anfahren des ersten Ports „unkontrolliert herumschleicht“.
- Zentrale Parameter sind die Anzahl der benötigten Ports #define PORT_CNT bzw. #define PARTLY_USED_PORTS (falls nicht alle angefahren werden sollen) und #define PARTLY_USED_PORTS_TAB (Tabelle der Ports, die angefahren werden können).
- Das #define DCC_MAERKLIN_7687_COMPATIBLE muss für die Verwendung von PC-Steuerungsprogrammen i.d.R. auf 1 gesetzt werden.
- Über das #define DCC_OFFSET kann ein Offset eingestellt werden, damit LocoTurn auf andere DCC-Adressbereiche reagiert. Der Offset wird auf die jeweiligen DCC-Adressen addiert. Bei manchen Zentralen muss z.B. der Roco-Offset von „-4“ hier eingestellt werden, damit LocoTurn die Adressen richtig interpretiert.
- Ebenso ist die letzte verwendete DCC Adresse anzupassen, wenn man nicht alle vorgesehenen DCC-Adressen benötigt: #define LAST_USED_DCC_ADDR.
- Liste der DCC-Adressen für die Ports anpassen: #define DCC_PORT_ADDR_LIST. Die Liste muss PORT_CNT-Einträge enthalten. Wenn der Märklin-Modus (DCC_MAERKLIN_7687_COMPATIBLE) verwendet wird, reichen PORT_CNT / 2 Einträge.
- Das #define ADVANCED_SIGNAL_CONTROL = 1 steuert die Signale in Abhängigkeit, ob die DS bei Stillstand mit der jeweiligen Seite an einem aktiven/gültigen oder blinden Port steht. Ob es sich um einen aktiven oder inaktiven/blinden Port handelt, legt das #define PORT_TYPE fest.
- Zur Kalibrierung kann man den DEBUG-Mode einschalten, damit im seriellen Monitor die Werte ausgelesen werden können: #define ENABLE_DPRINTF 1. Da das Serial.print viel Speicher benötigt, muss man ggf. vorübergehend DCC abschalten (#define USE_DCC 0).
- Bei Bedarf Einstellungen der Ausrichtung bzw. Drehrichtung von Drehscheibe, Potentiometer, Dreh/Drückknopf und Display vornehmen.
- Ggf. Änderungen an den Einstellungen der verschiedenen Drehgeschwindigkeiten vornehmen.
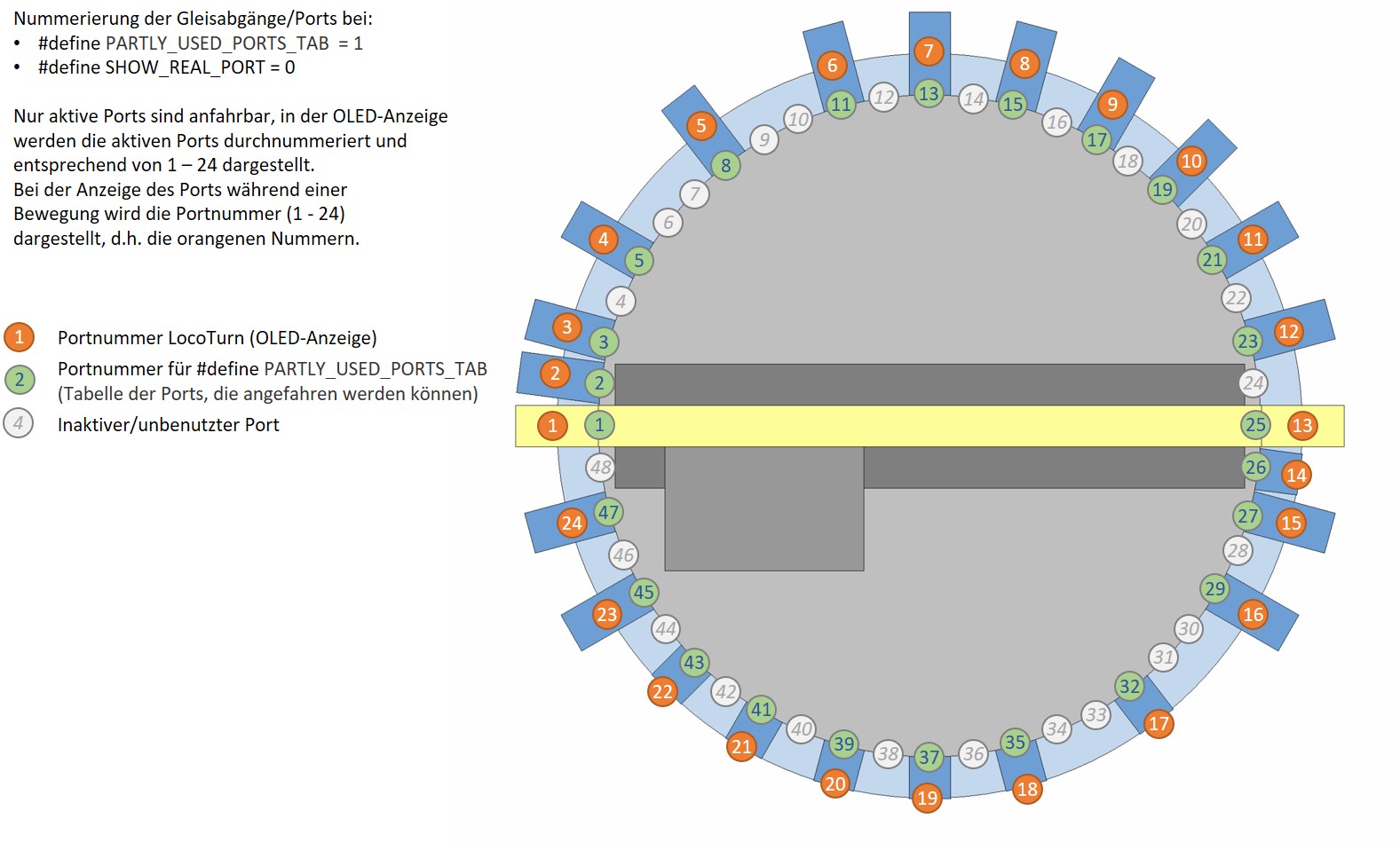
Die Abbildung zeigt eine Drehscheibe mit 48 möglichen Ports, davon werden 24 genutzt:
- Die orange-farbigen Ports können später von LocoTurn angefahren werden, sie werden mit der entsprechenden Nummer von 1 - 24 fortlaufend durchnummeriert und im OLED angezeigt.
- Die grün-markierten Ports müssen in das #define PARTLY_USED_PORTS_TAB eingetragen werden und zwar genau mit den Nummern aus der Abbildung. Daraus berechnet LocoTurn dann die korrekte Lage des Ports.
- Die hellgrauen Ports sind inaktiv und werden später bei Bewegungen übersprungen und können nicht angefahren werden.

Die kleinste sinnvolle Anzahl Ports ist 2: Ein Gleisabgang plus der dazugehörige gegenüberliegende U-Turn-Port für das Wenden der Lok. Damit kann man dann aber wirklich nur Loks wenden  .
.
Nummerierung der Ports/Gleisabgänge
In der Software-Version V1.0 hängt die Nummerierung der Ports im wesentlichen vom #define PARTLY_USED_PORTS ab. Es werden entweder alle Drehscheiben-Raster mit einer Nummer versehen und sind anfahrbar oder nur aktive Ports erhalten eine Nummer und nur diese aktiven Ports sind anfahrbar.
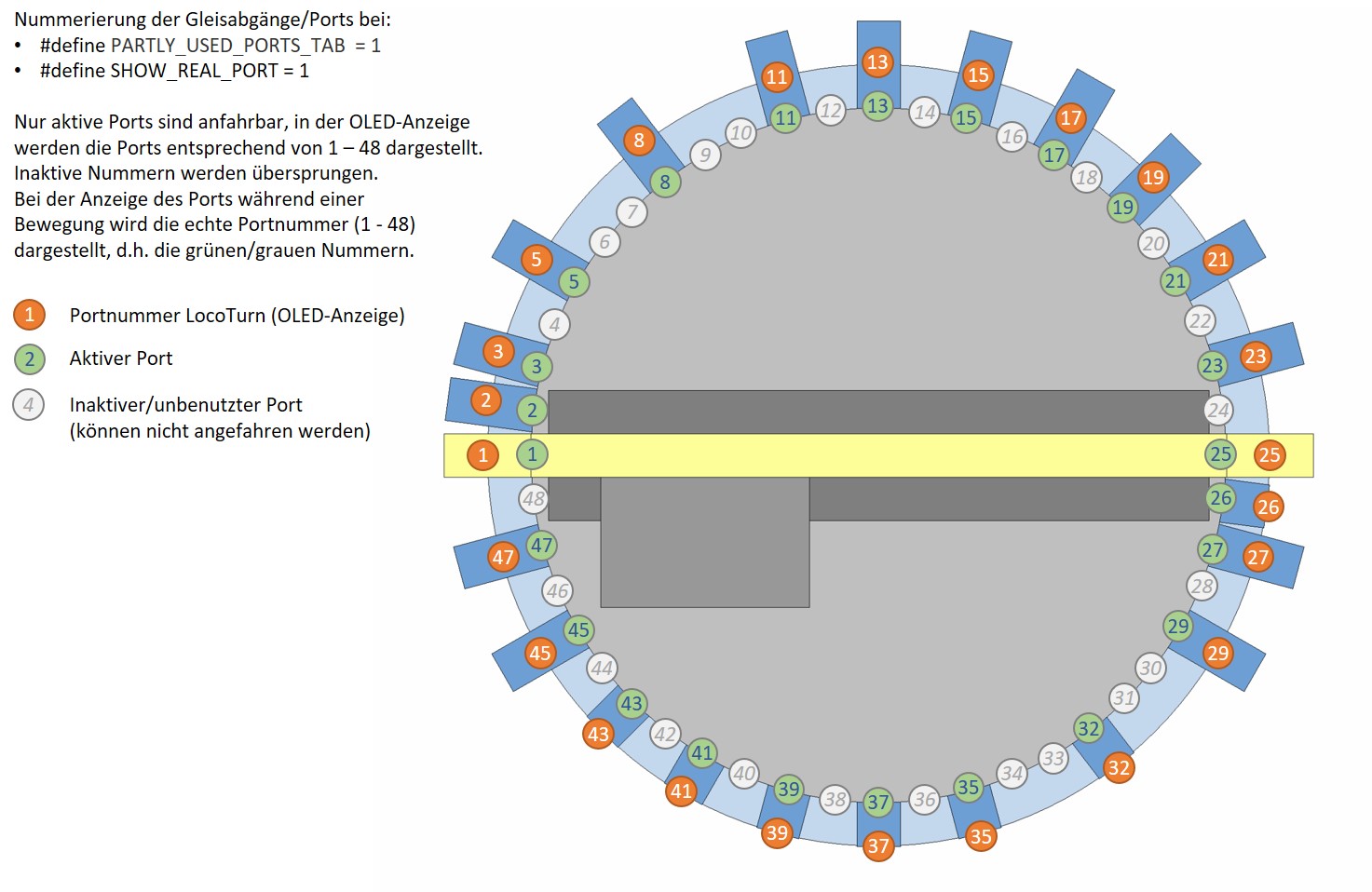
In der Version V1.1 gibt es darüber hinaus folgende Möglichkeiten, die über das neue #define SHOW_REAL_PORT eingestellt werden:
1. Nur aktive Ports werden in die Nummerierung einbezogen. Die Nummern in unserer Beispieldrehscheibe laufen von 1 - 24, nicht von 1 - 48. Das entspricht der Version 1.0 oben.
2. Echte Drehscheiben nummerieren häufig alle Ports durch, auch inaktive Ports, an denen keine Gleise angeschlossen ist, erhalten eine Nummer. Die Drehscheibe hat demzufolge dann 1 - 48 Ports, von denen nur bestimmte Ports genutzt werden.
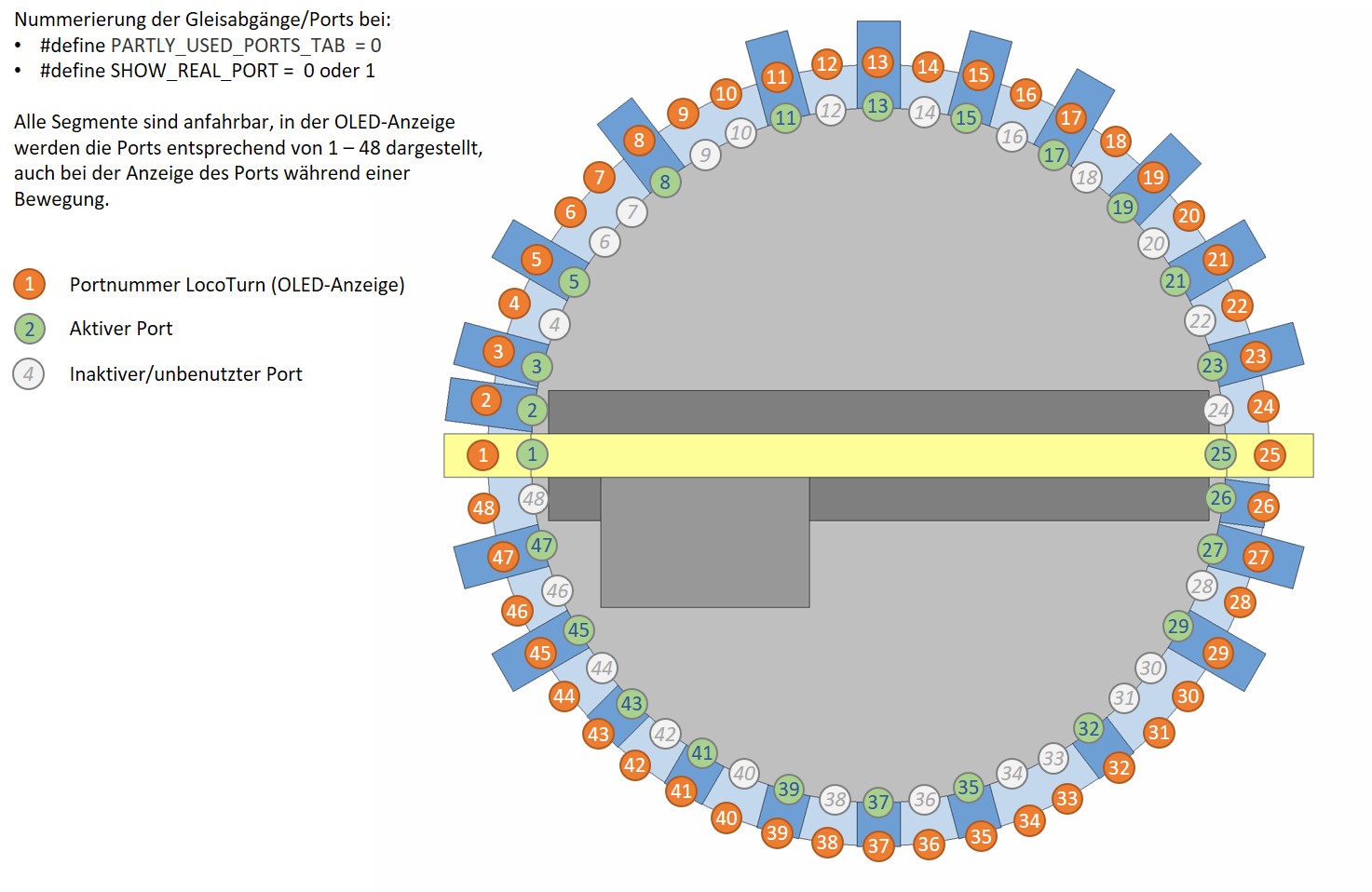
3. Wenn alle potentiellen Drehscheibenabgänge angefahren werden können, sieht die Nummerierung folgendermaßen aus:
Beispielkonfiguration
Ab der Version V1.1 sind einige #defines dazugekommen oder wurden umbenannt. Die folgende Turntable_config.h ist nur mit der entsprechenden ino-Version (1.1 oder höher) lauffähig.
Am besten man orientiert sich an den Einstellungen unten und passt alles an die eigene Drehscheibe an. Zu den meisten Parametern gibt es eine Erläuterung, ergänzt durch die jeweiligen Kapitel im Wiki:
//==================================================================================================================================================================
// Benutzer-spezifische Parameter V1.7
//==================================================================================================================================================================
/*
23.04.2026: Port-Konfiguration domapi-Anlage
Die Parameter hier dominieren diejenigen aus dem Hauptprogramm "Turntable"!
Falls ein bestimmter Parameter hier nicht definiert wurde, wird ein default-Wert aus dem Hauptsketch verwendet!
Hier stehen nur die wichtigsten Parameter, die am häufigsten benutzerindividuell eingestellt werden müssen.
Intention: Bei eine neuen Version des Hauptprogrammes bleiben die Einstellungen aus diesem Reiter erhalten!
*/
//==================================================================================================================================================================
// Parameterset 1: Wantai-Stepper oder StepperOnline-Stepper ohne Getriebe, 400 Steps pro Umdrehung, 6400 Micro-Steps
// 24 Gleisabgänge (= Ports) domapi-Anlage
//==================================================================================================================================================================
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
// Zentrale #defines zum Ein-/Ausschalten von Funktionen, um evtl. Speicher für Tests zu sparen!
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define USE_DCC 1 // 1 = use DCC interface 0 = disable all DCC routines
#define USE_SOUND 1 // 1 = Sound features enabled 0 = Sound features disabled
#define USE_SERIAL_INPUT 0 // 1 = Serial monitor input activated 0 = no processing of serial commands --> sollte in finaler Version ausgeschaltet sein, da man auf der Anlage später nicht über den PC steuert
#define USE_VERBOSE 0 // 1 = ausführliches Menü 0 = gekürztes Menü / nur wichtigste Befehle
#define USE_OLED 1 // 1 = use an OLED Display (could be disabled ("0") to save memory for tests ~6200 Bytes FLASH !!!). The outputs are sent to RS232 (serial monitor), then.
#define USE_BUTTONS 1 // Nutzung der 4 Taster auf der roten Panelplatine über analogen Eingang A0; es können auch zwei Taster gleichzeitig gedrückt sein
#define SHOW_STATUS 1 // 1 = Status-Screen im Menü aufrufbar, zeigt einige aktuelle Infos (Position, Ports, Steps/Umdrehung usw.) 0 = nicht aufrufbar, spart Speicher
#define USE_POTI 1 /* 0 = Drehen des Poti löst keine Drehscheibenbewegung aus 1 = Poti für manuelle Bewegungen wird benutzt
Achtung: Falls kein Poti angeschlossen wird, ist dieser Wert auf 0 zu setzen. Andernfalls schleicht die Drehscheibe u.U. vor sich hin.*/
#define ONLY_ONE_POSITION_DATASET 1 // 0 = alle 4 Positionsdatensets werden benutzt, 1 = nur das 1. Set verwenden (empfehlenswert bei hochsymmetrischen DS und wenn PC-Software zur steuerung verwendet wird)
//---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** Debugging***
//---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define ENABLE_DPRINTF 0 // Debug Ausgaben ein, zu Beginn evtl. auf 1 lassen, damit man sich die gespeicherten Positionswerte im seriellen Monitor ansehen kann
// Typische Konfigurationen:
// =========================
// Normalbetrieb auf der Anlage
//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//#define USE_DCC 1 // 1 = use DCC interface 0 = disable all DCC routines
//#define USE_SOUND 1 // 1 = Sound features enabled 0 = Sound features disabled
//#define USE_SERIAL_INPUT 0 // 1 = Serial monitor input activated 0 = no processing of serial commands --> sollte in finaler Version ausgeschaltet sein, da man auf der Anlage später nicht über den PC steuert
//#define USE_VERBOSE 0 // 1 = ausführliches Menü 0 = gekürztes Menü / nur wichtigste Befehle
//define SHOW_STATUS 1
//#define ENABLE_DPRINTF 0 // Debug Ausgaben aus
// Test der Steuerung und Einstellung der DS
// ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//#define USE_DCC 0 // 1 = use DCC interface 0 = disable all DCC routines
//#define USE_SOUND 1 // 1 = Sound features enabled 0 = Sound features disabled
//#define USE_SERIAL_INPUT 1 // 1 = Serial monitor input activated 0 = no processing of serial commands --> sollte in finaler Version ausgeschaltet sein, da man auf der Anlage später nicht über den PC steuert
//#define USE_VERBOSE 1 // 1 = ausführliches Menü 0 = gekürztes Menü / nur wichtigste Befehle
//#define SHOW_STATUS 0
//#define ENABLE_DPRINTF 1 // Debug Ausgaben ein
//------------------------------------------------------------------------------------------------------------------------------------------------------------------------
// Steuerung Beleuchtungseffekte
//------------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define LEDS_ON_BOARD 1 // Beleuchtungssteuerung über die LEDs auf der Platine (ohne WS28xx, ohne MLL)
#define WS281X_BOARD 2 // über eine kleine Bühnenplatine
#define MOBALEDLIB 3 // über die MLL
#define LIGHT_CONTROL WS281X_BOARD // MOBALEDLIB //WS281X_BOARD //LEDS_ON_BOARD
#define HOUSE_LIGHT_MODUS 2 // nur für direktes WS281x-Board: 0 = einfaches Ein/Aus 1 = Fade in/out 2 = Neonflicker
#define WS2811_R_G_OUTPUT_SWAPPED 0 // 0 = R und G Kanal sind nicht vertauscht, 1 = R und G Kanal sind vertauscht
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** Turntable ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
/* Folgende Einstellungen sind für die Port-Einrichtung der Drehscheibe am wichtigsten:
- Die Anzahl verwendeter Ports muss bei PORT_CNT eingetragen werden
- Wenn man PARTLY_USED_PORTS auf 1 setzt, müssen PARTLY_USED_PORTS_REFERENCE ausgewählt und die Portnummern aufsteigend sortiert in die Liste PARTLY_USED_PORTS_TAB eingetragen werden,
und zwar die jeweiligen Nummern der Drehscheiben-Abgänge
- Für die Signalsteuerung ist pro genutztem Port 0 oder 1 in der Liste PORT_TYPE einzutragen.
- Weiterhin muss die Polarisierung unten eingestellt werden. Entweder als von bis Wert POLARISATION_CHANGE_PORT_START bzw. _END oder als Liste POLARISATION_RELAIS_LIST mit der gewünschten Polarisierung.
- Die genutzten DCC-Adresse müssen definiert werden.
- Weitere Infos: https://wiki.mobaledlib.de/anleitungen/bauanleitungen/locoturn_v10/150_locoturn_parameter
*/
#define PORT_CNT 48 // Gesamtanzahl Ports/Gleisabgänge, hier im Beispiel eine symmetrische Fleischmann-Drehscheibe mit 48 Ports im 7,5° Raster
#define PARTLY_USED_PORTS 1 // 0 = alle Ports (hier 48) können angefahren werden, 1 = nur gültige Ports (aktive und passive) können angefahren werden (hier die 24 in der Liste PARTLY_USED_PORTS_TAB)
#if PARTLY_USED_PORTS /* If not all ports of the turntable should be selectable the following table could define the used ports. The used ports are defined as a reference to a fully defined table*/
#define PARTLY_USED_PORTS_REFERENCE 48 // which has PARTLY_USED_PORTS_REFERENCE ports (Gesamtanzahl Ports der FLM Drehscheibe = 48 entspricht 7,5° Raster)
#undef PORT_CNT // The number of real used ports is given in PORT_CNT.
#define PORT_CNT 24 // wir nutzen nur 24 von 48 Gleisabgängen/Ports
// die folgende Tabelle enthält alle genutzten Ports (aktive und passive), die man später anfahren kann.
// nicht enthaltene Portnummern (= inaktive Ports) können nicht angefahren werden und werden bei Drehungen einfach überprungen!
// die Nummern sind i.d.R. nicht fortlaufendend, sondern geben die relative Position der Ports zur Gesamtanzahl Ports an.
// hier ist alles auf 48 Ports bezogen, davon werden 24 genutzt
#define PARTLY_USED_PORTS_TAB { 1, 2, 3, 5, 8, 11, 13, 15, 17, 19, 21, 23, 25, 26, 27, 29, 32, 35, 37, 39, 41, 43, 45, 47 } // The table must have PORT_CNT entries which are sorted in ascending order
#define SHOW_REAL_PORT 0 // 0 = im OLED wird bei PARTLY_USED_PORTS = 1 die fortlaufende Portnummer der genutzten Ports angezeigt 1 = Anzeige des echten Ports (bei FLM-DS 1 - 48), Wert aus dem obigen Array
#endif
#define CIRCUMFERENCE 980.15 // 312 mm * Pi = circumference of the turntable [mm]; hier eine FLM-Drehscheibe mit 312 mm Bühnen-Länge
#define OFFSET_PORT_POSITION 0 // Um die Feinjustierung zu vereinfachen, wird bei Ports mit Defaultwerten die Position um diese Anzahl Steps entfernt angefahren (CW negativ, CCW positiv); nur bei unsymmetriwchen DS nutzen!
#define OFFSET_PORT_POSITION_U_TURN 0 // parameter used for U-turns
/*
Tipp:
-----
Man kann das Raster, in dem die Ports initial angelegt werden auch kleiner machen, z.B. 0,1 Grad genau. Hierzu muss man folgendes eintragen:
#define PORT_CNT 48 // Der Wert hier ist eigentlich egal, er wird weiter unten "überschrieben"
#define PARTLY_USED_PORTS 1 // 1 = only valid ports can be used
#if PARTLY_USED_PORTS
#define PARTLY_USED_PORTS_REFERENCE 3600 // Einteilung der DS in 3600 Ports
#undef PORT_CNT
#define PORT_CNT 4
#define PARTLY_USED_PORTS_TAB {300, 1350, 2100, 3150} // davon nutzen wir nur 4 Ports an diesen Positionen
#endif
Im Prinzip teilt das den Vollkreis in 3600 Ports/Gleisabgänge, von denen aber nur 4 genutzt werden, die quasi an beliebiger Stelle liegen können. Das Beispiel oben hat 4 anfahrbare Ports bei:
Grad Uhrzeit
30° 1
135° "halb" 5
210° 7
315° "halb" 11
*/
//---------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** Signalsteuerung ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define ADVANCED_SIGNAL_CONTROL 1 // 1 = Steuerung der Signale in Abhängigkeit, ob die DS-Seite bei Stillstand an einem aktiven/gültigen oder passiven/blinden Port steht. 0 = Einfache Signalsteuerung.
// Option 1: wenn PARTLY_USE_PORTS = 0
// Wenn man alle Ports anfahren können soll, hie z.B. 48, dann brauchen wir eine Liste mit 48 Nullen und Einsen
// Gleisabgang 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48
// #define PORT_TYPE 1, 1, 1, 0, 0, 1, 0, 1, 0, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 0, 1, 0 // Port-Type = 1 if there is an active / valid railway connected, 0 = passive/blind port (no railway connected). The table must have PORT_CNT entries. Required for advanced signal control (signal = red if turntable is no at a valid port)
// Option 2: wenn PARTLY_USE_PORTS = 1
// als Beispiel hier: bei 24 Ports sind einige aktiv, einige sind blind! Wir brauchen 24 Nullen und Einsen
// Gleisabgang 1, 2, 3, 5, 8, 11, 13, 15, 17, 19, 21, 23, 25, 26, 27, 29, 32, 35, 37, 39, 41, 43, 45, 47
#define PORT_TYPE 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 0 // Port-Type = 1 if there is an active / valid railway connected, 0 = blind port (no railway connected). The table must have PORT_CNT entries. Required for advanced signal control (signal = red if turntable is no at a valid port)
//---------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** Polarization relays ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define POLARISATION_RELAIS_PIN A1 // Polarisations-Relais for dual rail system (Set to -1 if not used)
#define POLARISATION_RELAIS_INVERS 0 // 0: Pin is set to high, if POLARISATION_RELAIS_LIST[Port] = 1 1: Pin is set to low, if 0
#define POLARISATION_CHANGE_PORT_START 11
#define POLARISATION_CHANGE_PORT_END 22
/* Teilt die Drehscheibe für die Polarisierung quasi in 2 Hälften.
Ab dem hier definierten START-Port (externe Nummerierung) wird das Polarisationsrelais bis zum i.d.R. gegenüberliegenden END-Port eingeschaltet.
Die hier eingegebenen Zahlen müssen zwischen 1 und PORT_CNT liegen! START muss < END sein!
Die eine Hälfte der Scheibe ist Polung 1, die andere Polung 2.
Spart einige Bytes ;-)
-1 = Polarisation gemäß der unten stehenden Liste
*/
//#define POLARISATION_RELAIS_LIST 0, 1, 0, 1 , 0, 1, 0, 1 ... // Pro genutztem DS-Port hier ein Eintrag in der Liste mit 0 oder 1
//---------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** Direction and control settings ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define ROTATIONSWITCH_DIRECTION -1 /* Set from 1 to -1 to change the direction of the rotation switch
-1 = Drehen nach rechts höhere Port-Nr.; links = niedrigere Port-Nr.*/
#define USE_ROTARY_ENCODER_MOVEMENT 1 // 0 = Drehen des Encoders löst keine Drehscheibenbewegung aus, Menüs fkt. aber 1 = Encoder steuert die DS und Menü fkt.
#define SPEED_POTI_DIRECTION -1 // Set to -1 to change the direction of the speed poti; bei domapi-Platine "-1"
#define ROTATIONSWITCH_MENU_DIR 1 // Set from 1 to -1 to change the direction of the rotation switch in the menu: Rechts-Drehung = Zeile nach unten im Menü
#define TURNTABLE_DIRECTION 1 // Set 1 to -1 to change the rotation / port number direction, abhängig von der Polung der Motorspulen --> einfach ausprobieren!
// Wenn fahrtdauerabhängige Sounds verwendet werden, dann muss ENCODER_LOGIC = 1 sein, sonst passen die Sounds nicht zur Bewegung ;-)
#define ENCODER_LOGIC 1 /* 1 = Drehencoder drehen während Stillstand ermöglicht Portauswahl
- Bewegung wird erst gestartet, wenn Encoder-Taste gedrückt wird
- während der Bewegung kann die anzufahrende Portnummer nicht mehr geändert werden
- Taste während Bewegung ruft das Menü auf und stoppt die Bewegung
0 = Encoder startet Bewegung, während Bewegung kann weiter gedreht werden*/
#define DIRECTION_CHANGE_POSSIBLE 0 // 1 = Richtungsänderung erlaubt, wenn anderer Befehl bei bereits gestarteter Bewegung kommt 0 = keine Richtungsänderung, eine einmal eingeschlagene Richtung wird beibehalten
#define MOVE_STATUS_INVERS 1 /* Invert the level of the S88_MOVING_PIN:
- 1 and turntable moving = Optokoppler sperrt.
- 1 + Stillstand: OK steuert durch und erzeugt eine Rückmeldung.
Viele Steuerungssoftwarepakete erwarten ein Signal, wenn die DS steht (d.h. angekommen ist)*/
#define MOVE_STATUS_FIX 4 // Zeit in s, die der Bewegungsmelder "DS steht still" wartet, bis der nach dem Stillstand eingeschaltet wird (fixe Zeit)
#define MOVE_STATUS_RANDOM 7 // zufälliger Zeitanteil in s, der auf den fixen Wert addiert wird (abzgl. 1)
//------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** Schrittmotor ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define FIXED_STEPS_PER_ROUND 6400 // manuelle Vorgabe der Anzahl Steps pro Umdrehung; "0" = automatische Ermittlung
#define FIXED_STEPS_HAS_CONTACT 0 // manuelle Vorgabe des Getriebespiels; "-1": dann wird das Spiel automatisch ermittelt, Werte >= 0 --> manuelle Vorgabe
#define NOT_ENABLE_PIN 6 /* Set to -1 if the stepper driver has an automatic power mode like the TMC2100
The pin of the module must be left open (std 6)
Use Pin 6 for TMC2208 */
#define ENABLE_ALWAYS_ON 1 /* Vermeidet bei meinem aktuellen Steppermotor ohne Getriebe das Ruckeln in der Start-/Endposition
Nachteil: Motor wird dauerhaft angesteuert und wird warm!
Set to 1 for a powerful stepper without gearbox because the magnetic field will change the position when powered of
If a stepper driver like the TMC2100 is used it's better to disable the NOT_ENABLE_PIN (-1) to activate the automatic power saving mode instead.
Bei Einsatz TMC2208 sollte man den Wert 1 verwenden! */
#define STEPPER_RAMP_LENGTH 180 /* Steps to speed up the stepper to prevent loosing steps
Set to 50 if 1/16 steps are used (MS1 - MS3 connected do +5V)*/
#define MOVE_SPEED1 600 // Default speed and activated when DCC_SET_SPEED1_ADDR is received
#define TURNBACK_SPEED 600 // Speed used for TurnBackAndSetZero
#define USE_TURNBACK 0 // 1 = Turn back & set 0-point will be executed if 0-point is detected in negative rotation direction 0 = not used
#define MOVE_SPEED2 400 // Speed activated when DCC_SET_SPEED2_ADDR is received
#define MOVE_SPEED3 200 // Speed activated when DCC_SET_SPEED3_ADDR is received
#define MOVE_SPEED4 2600 // Speed activated when DCC_SET_SPEED4_ADDR is received
#define CLEARANCE_TEST_SPEED 1200 // Speed used in the clearance test
#define CALIBRATE_SPEED_FAST 1200 // Speed used for the zero point and total number of steps detection
#define CALIBRATE_SPEED_SLOW 200 // Slow speed used for the advanced zero point detection
#define ZERO_DETECTION_OFFSET 60 // Used for moving a little bit away from Hall-Sensor
#define MIN_STEPS_HAS_CONTACT 0 /* Typical value = 30.
Don't move fast to the contact point in the "Poti" mode if Steps_Has_Contact
is below this value. Set to 0 to disable the check (Always move fast to the contact point)
Problem: The Steps_Has_Contact detection may be not accurate because of sensor errors
0 = kein Anfahrruckler
TODO: evtl. muss die Routine, die das Getriebespiel "überbrückt" direkt in der Loop aufgerufen werden, wenn die eigentlich Bewegung gestartet wird*/
#define ALWAYS_CALIBRATE_AT_START 1 // Set to 1 to calibrate the 0-position (Hallsensor) every time when the program is started. Helps to compensate little jumps of the turntable when turned on.
#define ADVANCED_REFERENCE_DETECTION 1 // "1" fährt den Hallsensor beim 0-Punkt Kalibieren schnell an, dreht ein Stückchen zurück und fährt ihn nochmals langsam an und speichert die Referenzposition
//------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** OLED ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define OLED_TYP 13 // Tested with the following displays 87, 91, 96, 13
#define USE_u8x8 1 // 1 bei Typ 96 und 13
#define NO_FLICKER_u8x8 0 // 1 = Disable the flickering if USE_u8x8 is active (Uses 74 bytes FLASH); wir nutzen "0" beim 1,3" OLED, da nix flackert :-)
#define SHOW_POSITION_MAINSCREEN 0 // Positionsanzeige auf dem Hauptscreen, dann muss LARGE_PORT_NUMBER_OLED = 0 sein (keine größee Schrift!)
#define USE_LARGE_FONT_FOR_NUMBERS 0 // Anzeige vom Port- bzw. Gleis-Nummer in größerer Schrift. 0 = kein weiterer Font notwendig
#define LARGE_PORT_NUMBER_OLED 1 // Spezialfall z.B. für das 1,3" OLED, damit kann man den Port bei Auswahl des Zielports und bei Stillstand in größerer Schrift anzeigen,
// nur möglich, wenn #define SHOW_POSITION_MAINSCREEN = 0
// und bei #define ONLY_ONE_POSITION_DATASET = 1
// bisher kein Test mit anderen OLED-Typen erfolgt!
#if LARGE_PORT_NUMBER_OLED == 1 && ONLY_ONE_POSITION_DATASET == 0
#undef LARGE_PORT_NUMBER_OLED
#define LARGE_PORT_NUMBER_OLED 0
#endif
#if LARGE_PORT_NUMBER_OLED == 1 && SHOW_POSITION_MAINSCREEN == 1
#undef LARGE_PORT_NUMBER_OLED
#define LARGE_PORT_NUMBER_OLED 0
#endif
//---------------------------------------------------------------------------------------------------------------------------------------------------------------
// ** Flashing & light setup ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define MOVING_FLASH_INVERS 0 // Normal: 0 = LED connected to GND
#define MOVING_FLASH_MODE 2 // 1 = Blink, 2 double flash
#define HOUSE_BRIGHTNESS 255 // Brightness of house LED, valid values 0 - 255, 0 = off, 255 = very bright, saves separate resistor ;-)
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** sketch internal parameters ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define BITSCHIEBER 1 // 1 = direkte Bitmanipulation 0 = digitalRead/Write, pinMode, FastPin ToDo: Prüfen, ob irgendwelche Libs noch digitlaRead etc. nutzen
#define SPEED_POTI_MID_RANGE 35 // Range (+/-) of the speed poti which is considered as 0
#define SPEED_POTI_CENTER 521 // Center position of the speed poti (Normally 512)
#define ANALOG_SPEED_DIVISOR 40 // Divisor used to calculate the analog speed with the poti (std 8, 50)
#define MIN_ANALOG_SPEED 40 // 1 => 10 sec reaction time ;-( Reaction time = 10 sec / MIN_ANALOG_SPEED
#define ALWAYS_CHECK_STEPS_ONE_TURN 0 // Always check the steps for one turn at power on
#define ASK_TO_UPDATE_ALL 0 // = 1: Ask to update all ports when Port 1 is redefined > 1: Ask to update all ports for every port
#define ALWAYS_SET_ZERO_IN_POS_DIR 1 // 1 = Check and adjust the 0-position always, if the hall sensor has been detected 0 = only if 1 complete turn was moved
//-----------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** Sound Setup ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define DFPLAYER 1 // mit DS-Kartenslot
#define JQ6500 2 // 2MB Speicher onboard
#define USE_SOUNDMODULE DFPLAYER //JQ6500 // Auswahl des verwendeten Soundmoduls
#define USE_SOUND_SERIAL -1 // SMART_JQ6500_SERIAL_PIN --[1K]-- TX; -1 = hardware serial is used (TX-Pin) for JQ6500 interface; DFPlayer uses softwareserialTX on Pin D12
#define SOUNDMODULE_VOLUME 18 // Range: 0..30 (-1 = Don't change the volume)
#define DELAY_TURN_START_SOUND 7700 /* Delay before start moving if sound is played, hängt ab vom verwendeten soundfile; bei mir machen 7,7s Sinn!
Bei Verwendung eines DFPlayers ca. 300 ms dazu addieren, da dieses Soundmodul verzögert startet über softwareserial*/
#define SOUND1_FILENR 1 // sound-file number of JQ6500 / DFPLayer for turntable start and running (Hupe, Anfahren und Drehen)
#define SOUND2_FILENR 3 // sound for turntable stop (aktuell nur die Hupe)
#define SOUND_CONTINUOUS_MOVE 1 // 0 = kein Abspielen von sounds bei DS-Bewegungen mit dem Poti 1 = Sound wird automatisch abgespielt
#define FAHRTDAUER_MESSEN 0
#define ADVANCED_SOUND 1 /* 0 = es werden zwei Sounds abgespielt, einer beim Starten der Bewegung (gesampelt aus Hupen, Anfahren und Fahren), einer beim Stoppen (Hupen); Bremssound ist nicht verfügbar
1 = die Fahrtdauer wird berechnet und ein entsprechender langer Sound gestartet, hierfür brauchen wir mehrere Files auf dem Soundmodul.
Jedes file entält Hupen, Anfahren, Fahren, Bremsen bis zum Stopp und abschließendes Hupen. Der variable Anteil ist das Fahren, das muss solange hintereinander kopiert werden, dass es für die entsprechende Fahrtstrecke reicht
Ein separater Sound beim Stoppen (Hupen) wird nur bei manuellem Stopp abgespielt, beim auto. Fahren ist der sound bereits im Fahrgeräusch enthalten
ENCODER_LOGIC dann auf 1 setzen (siehe oben)*/
#define DCC_SOUNDFILE_1 1 // File-Nr. auf dem Soundmodul, das abgespielt wird mit dem entsprechenden DCC-Befehl
#define DCC_SOUNDFILE_2 2 // J6500; Dateien stehen im Rootverzeichnis, Reihenfolge geht nach Reihenfolge des Kopierens auf das Modul
#define DCC_SOUNDFILE_3 3 // DFPlayer: Dateien müssen im \mp3-Folder stehen, Nomenklatur 0001_beliebiger Text (4-stellige Nummer, führende Nullen + sprechender Text)
#define DCC_SOUNDFILE_4 28
#define DCC_SOUNDFILE_5 29
#define DCC_SOUNDFILE_6 30
//---------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** Pins ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
// n/a --> alle aus dem Hauptsketch verwenden!
//------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** DCC ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
#define DCC_OFFSET 0 // -4 = Roco-Offset für Roco-Zentrale, 0 = DCC addresses start at #211, using this parameter you can use other DCC ranges in case of using several turntables with one central station or you rewuire other address ranges
#define DCC_WAITING_TIME 200 //350 // waiting time [ms] for further DCC-tickets before carrying out the DCC command
#define DCC_MAERKLIN_7687_COMPATIBLE 1 // 1 = DCC-Befehle nur für den 1. Halbkreis der DS verwenden. In Verbindung mit der Drehrichtung kann trotzdem jeder Port so angefahren werden, dass das DS-Haus richtig steht, notwendig bei Verwendung einer PC-Steuerung!
// 0 = wir berauchen für alle Ports DCC-Adressen um sie anfahren zu können ==> wird normalerweise bei Anlagen ohne PC-Steuerung verwendet!
#if DCC_MAERKLIN_7687_COMPATIBLE == 1
// sollte man nur verwenden, wenn man mit einer PC-Steuerung arbeitet
#define LAST_USED_DCC_ADDR DCC_CHKADDR((234 + DCC_OFFSET), GRN) // die "234" und das "GRN" sind an die tatsächlich verwendete letzte Adresse unten anzupassen!
#else
// wenn man ohne PC-Steuerung arbeitet
#define LAST_USED_DCC_ADDR DCC_CHKADDR((229 + PORT_CNT / 2 - 1 + DCC_OFFSET), GRN) // wird automatisch berechnet
#endif
// Momentan 24 (von 48) genutzte Ports = { 1, 2, 3, 5, 8, 11, 13, 15, 17, 19, 21, 23, 25, 26, 27, 29, 32, 35, 37, 39, 41, 43, 45, 47 }
#if DCC_MAERKLIN_7687_COMPATIBLE == 1
// sollte man nur verwenden, wenn man mit einer PC-Steuerung arbeitet
// Es werden nur für die Ports im ersten Halbkreis DCC-Adressen benötigt
// Bei 24 Ports braucht man hier also 12 DCC-Adressen (= 12 Zeilen)
// Die erste Zahl in der Klammer ist immer fortlaufend und startet bei 1. Sie hat nichts mit der Portnummer oben zu tun (die kann nicht fortlaufend sein).
// Pro DCC-Adresse gibt es 2 Befehle bzw. Richtungen: RED und GRN
#define DCC_PORT_ADDR_LIST DCC_PORT_ADDR(1, (229 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(2, (229 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(3, (230 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(4, (230 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(5, (231 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(6, (231 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(7, (232 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(8, (232 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(9, (233 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(10, (233 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(11, (234 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(12, (234 + DCC_OFFSET), GRN)
// die vorhergehende Zeile beschreibt die letzte Adresse und muss oben ins #define LAST_USED_DCC_ADDR eingetragen werden
#else
// wenn man ohne PC-Steuerung arbeitet
// DCC-Adressen für den kompletten Vollkreis notwendig!
// Bei 24 Ports braucht man hier auch 24 DCC-Adressen (= 24 Zeilen)
#define DCC_PORT_ADDR_LIST DCC_PORT_ADDR(1, (229 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(2, (229 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(3, (230 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(4, (230 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(5, (231 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(6, (231 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(7, (232 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(8, (232 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(9, (233 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(10, (233 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(11, (234 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(12, (234 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(13, (235 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(14, (235 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(15, (236 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(16, (236 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(17, (237 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(18, (237 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(19, (238 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(20, (238 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(21, (239 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(22, (239 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(23, (240 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(24, (240 + DCC_OFFSET), GRN)
// Bei mehr als 41 Einträgen/Zeilen in dem obigen #define spinnt der Compiler!
// Workaround: dann müssen die zusätzlichen Zeilen in das #define ... LIST_2 aufgenommen werden ;-)
/* #define DCC_PORT_ADDR_LIST_2 DCC_PORT_ADDR(27, (242 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(28, (242 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(29, (243 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(30, (243 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(31, (244 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(32, (244 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(33, (245 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(34, (245 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(35, (246 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(36, (246 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(37, (247 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(38, (247 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(39, (248 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(40, (248 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(41, (249 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(42, (249 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(43, (250 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(44, (250 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(45, (251 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(46, (251 + DCC_OFFSET), GRN), \
DCC_PORT_ADDR(47, (252 + DCC_OFFSET), RED), \
DCC_PORT_ADDR(48, (252 + DCC_OFFSET), GRN)
*/
#endif
// ggf. hier weitere Zeilen ergänzen, wenn zusätzliche DCC-Befehle für weitere Ports benötigt werden
// die letzte DCC-Adresse muss sich oben aus der #define-Formel bei LAST_USED_DCC_ADR ergeben !!!
//---------------------------------------------------------------------------------------------------------------------------------------------------------------
// *** Tastenauswertung ***
//------------------------------------------------------------------------------------------------------------------------------------------------------------------
// Das #define definiert die 4 Schwellwerte für die 4 Taster auf der Panelplatine hier in der Config-Datei
// Bei Änderungen in der ino-Datei bleiben die individuellen Werte unten erhalten!
#define BUTTON_THRESHOLDS 970, 327, 696, 872
#define HOME_RUN_PORT 24 // wird bei der Tastersteuerung verwendet, bei einem entsprechenden Tastendruck fährt die DS zum angegebenen Port
/* folgende Aktionen stehen für die Taster zur Verfügung:
B_Toggle_House() Hausbeleuchtung ein/aus
B_Toggle_Sound() Sound ein/aus
B_Toggle_Signal_House() Signal Hausseite rot/weiß
B_Toggle_Signal_Opposite() Signal Gegenüber rot/weiß
B_Signal_House_red() Signal Haussseite rot
B_Signal_House_white() dito. weiß
B_Signal_Opp_red() Gegenüber rot
B_Signal_Opp_white() dito. weiß
B_U_Turn_CW() 180°-Drehung CW
B_U_Turn_CCW() 180°-Drehung CCW
B_Home_Run() Anfahren der Home-Position
B_Toggle_Flash() Warnleuchte ein/aus
Play_Sound(n) Sound n auf dem JQ6500 abspielen
Auto_Calibrate(1) führt die Kalibirierung des Nullpunktes durch
*/
// Hier den Tastern die Aktion zuordnen (kann man auch mehrfach machen, dann ";" dazwischen!):
// #define BUTTON_n ohne weitere Zuordnung deaktiviert den Knopf bzw. löst keine Aktion aus, z.B. "#define BUTTON_1"
// kurzer Tastendruck:
#define BUTTON_1 Play_Sound(28) // spielt Soundfile 28 ab; falls Sound generell deaktiviert wurde, muss man die Taste deaktivieren, siehe oben
#define BUTTON_2 B_U_Turn_CW()
#define BUTTON_3 B_Toggle_House()
#define BUTTON_4 B_Toggle_Flash()
// langer Tastendruck:
#define BUTTON_1_L B_Home_Run()
#define BUTTON_2_L B_U_Turn_CCW() // U-Turn gegen den Uhrzeigersinn
#define BUTTON_3_L B_Toggle_Sound() // Sound on/off
#define BUTTON_4_L Auto_Calibrate(1) // führt die Kalibrierung des Nullpunktes durch