Inhaltsverzeichnis
Steppertreiber-Spannung einstellen
Bevor der Stepper Motor an eine der Platinen angeschlossen wird, muss man die Referenzspannung am Treiber einstellen. Das geschieht über das kleine Potentiometer am Stepper Treiber.
Die benötigte Spannung lässt sich hier über drei Online Rechner super einfach ermitteln.
Notwendige Werkzeuge
- Multimeter mit einer hohen Spannungsauflösung im Bereich bis 2V
- Schraubenzieher mit passender Spitze für das Drehpoti
Spannung ermitteln
Werte des Motors ermitteln
Zur Berechnung der Referenzspannung werden lediglich die Nennspannung und der Spulenwiderstand des Motors benötigt.
Beides steht bei den meisten Motoren im Datenblatt oder wird vom Verkäufer angegeben.
Der Spulenwiderstand lässt sich aber auch ganz einfach mit einem Multimeter ermitteln, indem man den Widerstand zwischen A+ und A- misst.
Steppertreiber einstellen
Alle Steppertreiber verfügen über ein Potentiometer, an dem die Referenzspannung eingestellt werden kann. Der Wert dieser Spannung variiert je nach verwendetem Steppertreiber.
Für die gängigen Modelle bietet das Wiki an dieser Stelle drei Rechner, die den benötigten Wert anhand der Nennspannung und des Spulenwiderstands des Motors berechnen.
A4988
Für die Berechnung ist der Messwiderstand des Steppertreibers entscheidend. Das Modul A4988 gibt es in verschiedenen Versionen mit Widerständen von 0.05Ω bis 0.3Ω.
Den Widerstand kann man meistens direkt auf den beiden SMD-Widerständen ablesen. Diese befinden sich meistens direkt bei den Anschlüssen für die Motor-Spulen.
DRV8825
Für die Berechnung ist der Messwiderstand des Steppertreibers entscheidend. Das Modul DRV8825 gibt es normalerweise nur mit einem Messwiderstand von 0.10Ω.
Den Widerstand kann man meistens direkt auf den beiden SMD-Widerständen ablesen. Diese befinden sich meistens unterhalb des Potentiometers zwischen den Anschlüssen GND und DIR.
TMC210x / TMC220x
Bei dem Steppertreiber TMC2208 entfällt die Unterscheidung nach Widerständen, da das Modul den Effektivstrom für die Berechnung verwendet.
Spannung einstellen
Die oben ermittelte Referenzspannung wird nun über das Potentiometer des Stepper-Treibers eingestellt.
Der Treiber muss dazu mit Strom versorgt werden und der Motor darf während der Messung nicht angeschlossen sein.
Das geht am besten, wenn der Stepper-Treiber in der fertigen Platine sitzt.
Vor dem Einstellen der Steppertreiberspannung unbedingt Motor trennen!
Vor dem Trennen des Motors unbedingt den Stepper spannungsfrei machen!
Oder anders ausgedrückt: Mit 7 Schritten zum Erfolg
1. Stepper-Treiber spannungsfrei machen
2. Motor trennen
3. Stepper-Treiber mit Spannung versorgen
4. Steppertreiberspannung einstellen
5. Stepper-Treiber spannungsfrei machen
6. Motor verbinden
7. Stepper-Treiber mit Spannung versorgen
Zunächst verbindet man den Steppertreiber mit der Versorgungsspannung Vmot. Die Platinen bieten dafür unterschiedliche Möglichkeiten:
- Beim Mini Stepper Pro kann man mit den Jumper „Select“ entweder 5V oder 12V (sofern vorhanden) über das Flachbandkabel vom LED-Bus abgreifen.
Wird eine höhere Spannung oder mehr Strom benötigt, als das Flachbandkabel liefert, gibt es eine separate Spannungsversorgung über die Schraubklemmen. - Bei Theos MLL Stepper kann man mit den Jumper „Select“ entweder 5V oder 12V (sofern vorhanden) über das Flachbandkabel vom LED-Bus abgreifen.
Zum Messen der Referenzspannung wird die rote Spitze an das Poti der Stepperplatine und der Minuspol des Multimeters mit einem Massepol auf der Platine verbunden.
Das Potentiometer ist aus Metall und liegt auf dem Spannungsniveau des Vref-Pins.
Man kann sich die Sache etwas einfacher machen, wenn man die rote Messleitung des Potentiometers über eine Krokodilklemme o. Ä. mit dem Schraubenzieher verbindet. So kann man gleichzeitig einstellen und den Wert ablesen. Das geht insgesamt schneller, setzt aber einen guten Halt der Krokodilklemme an einem runden Bereich des Schraubenziehers voraus.
Nachfolgend sind die Messpunkte zum Einstellen der Referenzspannung markiert.
Die Messpunkte am Steppertreiber A4988:

Die Messpunkte am Steppertreiber DRV882:

Die Messpunkte am Steppertreiber TMC2208:

Fertig:
Der Stepper-Treiber ist nun einsatzbereit. Die Versorgungsspannung wird erneut getrennt, um den Motor anschließen zu können.
Nun geht es an die Programmierung.
Jumper für Stepperboards
Die empfohlene Jumpereinstellungen sind in den nachfolgenden Tabellen hervorgehoben.
Die beiden Platinen Mini Stepper Pro und MLL Stepper unterscheiden sich grundlegend in der Steuerung der Geschwindigkeit.
Beim MLL Stepper wird der Stepper durch das Stecken von Jumpern auf die MS-Pins verlangsamt.
Mit jedem Jumper, den man steckt, bekommt der Stepper-Treiber über diese Leitung eine positive Flanke.
Beim Mini Stepper Pro bekommen die drei Pins MS1 bis MS3 schon auf der Platine eine positive Flanke.
Ohne Eingriff läuft der Stepper-Motor an dieser Platine immer mit 1/16 der Geschwindigkeit.
Über den integrierten WS2811 lassen sich diese drei Pins auf Masse ziehen, wodurch der Stepper-Motor schneller wird.
A4988
Micro-Stepping
| MS1/Rot | MS2/Grün | MS3/Blau | Microstep Auflösung |
|---|---|---|---|
| GND/255 | GND/255 | GND/255 | 1/1 |
| VCC/0 | GND/255 | GND/255 | 1/2 |
| GND/255 | VCC | GND/255 | 1/4 |
| VCC/0 | VCC/0 | GND/255 | 1/8 |
| VCC/0 | VCC/0 | VCC/0 | 1/16 |
DRV8825
Micro-Stepping
| MS1/Rot | MS2/Grün | MS3/Blau | Microstep Auflösung |
|---|---|---|---|
| GND/255 | GND/255 | GND/255 | 1/1 |
| VCC/0 | GND/255 | GND/255 | 1/2 |
| GND/255 | VCC/0 | GND/255 | 1/4 |
| VCC/0 | VCC/0 | GND/255 | 1/8 |
| GND/255 | GND/255 | VCC/0 | 1/16 |
| VCC/0 | VCC/0 | VCC/0 | 1/32 |
TMC220x
Micro-Stepping
| MS1 | MS2 | Microstep Auflösung |
|---|---|---|
| GND/255 | GND/255 | 1/8 |
| VCC/0 | GND/255 | 1/2 |
| GND/255 | VCC/0 | 1/4 |
| VCC/0 | VCC/0 | 1/16 |
Liste der erfolgreich eingesetzten Stepper-Motoren
Diese Liste soll beim Einrichten der Stepper-Motoren und der Stepper-Treiber helfen. Jeder ermittelte und funktionierende Stepper sollte hier gelistet werden.
Die letzte Spalte „Steppertreiberspannung“ enthält nur ein Beispiel an dem jeweils getesteten Stepper-Treiber. In der Anleitung ist beschrieben, wie man mit den angegebenen Werten auch an jedem anderen Stepper-Treiber zum Ziel kommt.
Wer die entsprechenden Werte ermittelt hat und keine Schreibrechte im Wiki hat, kann diese im Forum veröffentlichen oder mir (raily4) per PN schicken, damit ich diese Liste pflegen kann.
| Abbildung | Bezeichnung | Quelle | Beschriftung | Nennspannung | Spulenwiderstand | Stromaufnahme | Anschluss | Microstep Auflösung | Versorgungsspannung (Vmot) | Steppertreiberspannung |
|---|---|---|---|---|---|---|---|---|---|---|
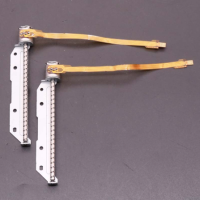 | Stepper Motor linear 68mm | Aliexpress | 3812CL | 5 Volt | 19,5 Ω | 256 mA | A+ B+ A- B- | 1/4 oder kleiner | 5 Volt | 164 mV (A4988, 0,10 Ω) |
 | Mini 4mm Micro Stepper | Aliexpress | 3 Volt | 14,4 Ω | 208 mA | A+ A- B- B+ | 1/2 oder kleiner | 5 Volt | 133 mV (A4988, 0,10 Ω) | |
 | Schrittmotor NEMA 14, 35x28mm | 20181215 | 20 Ω | 460 mA | A+ = Schwarz, A- = Grün, B- = Blau, B+ = Rot | 18 Volt | 368 mV (TMC2208) | |||
 | STEPPERONLINE 17HM15-0904S | 6 Ω | 900 mA | A+ Schwarz, A- Grün, B+ Rot, B- Blau | 1/16 | 24 Volt | 721 mV (TMC2208) | |||
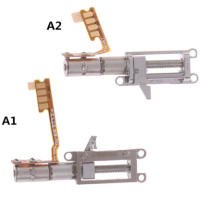
 | Stepper Motor linear 50 mm | 144825000545 | 3-6 V | 10 Ω | 500 mA | A- A+ B- B+ | 1/4 oder kleiner | 12 Volt | 320 mV (A4988, 0,10 Ω) |