Inhaltsverzeichnis
Drehscheibenbewegungen
Man kann über das #define PARTLY_USED_PORTS auswählen, ob alle Ports anfahrbar sind oder nur die aktiven und passiven, also die mit Gleisanschlüssen bzw. deren Gegenüber.
Standardmäßig - außer bei DCC-Befehlen - nimmt die DS immer den kürzesten Weg zum nächsten anzufahrenden Port (DIRECTION_CHANGE_POSSIBLE = 0). Am Beispiel der Uhr: aktueller Port ist 3 Uhr, wir wollen auf 10 Uhr fahren. Der kürzere Weg ist entgegen dem Uhrzeigersinn. Die Drehscheibe wird rückwärts gedreht.
Im Hauptbildschirm ist bei Stillstand in der Mitte der aktuelle Port ersichtlich und darunter die Position des Steppermotors:
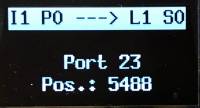
Die oberste Zeile ist eine Statuszeile, sie stellt dar:
- Initialisierungsstatus I ja/nein (1/0), zeigt, ob mindestens in einer Richtung die Positionen finegetuned wurden. Alternativ wird ab Version V1.6 hier der Status des DCC-only-Modus angezeigt D0 bzw. D1. Dieser zeigt an, ob die DS nur auf DCC-Befehle reagiert (D1) oder auch auf Drehencoder, Poti etc. (D0).
- Polarisierungsrelais P on/off (1/0)
- DCC-Richtung <—- -—> (nur wenn DCC verwendet wird, d.h. #define USE_DCC = 1)
- Licht L on/off (1/0)
- Sound S on/off (1/0)
Ab V1.7 kann man durch entsprechende Parameter (#defines) den Port in größerer Schrift darstellen, Voraussetzungen siehe die beispielhafte Turntable_config.h im Wiki. Dann muss man auf die Positionsangabe verzichten.

Drehscheibenbewegungen können über mehrere Wege ausgelöst werden:
Drehencoder
Es sind 2 unterschiedliche Steuerungslogiken für den Drehencoder definiert, die über ENCODER_LOGIC eingestellt werden:
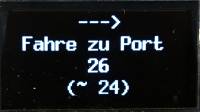
- ENCODER_LOGIC = 1 Drehencoder-Drehen während des Drehscheiben-Stillstands ermöglicht Portauswahl, Bewegung wird erst gestartet, wenn Encoder-Taste gedrückt wird, während der Bewegung kann die anzufahrende Portnummer nicht mehr geändert werden, Taste während Bewegung stoppt die Bewegung. Die folgende Abbildung zeigt die Auswahl des Zielports in großer Schrift, hier würde die Drehscheibe nach Drücken des Drehencoders zu Port 20 fahren.

- ENCODER_LOGIC = 0 Encoder-Drehen startet sofort die Bewegung, während einer Bewegung kann weiter am Encoder gedreht und ein anderer Port selektiert werden. Drücken der Encoder-Taste während einer Bewegung stoppt die Drehscheibe.
Beim Mehrfach-Drehen des Drehencoders behält die DS die einmal eingeschlagene Richtung bei, wenn DIRECTION_CHANGE_POSSIBLE = 0 ist, auch wenn es andersherum kürzer wäre. Dies verhindert abrupten Richtungswechsel in der Bewegungsphase.
Bei DIRECTION_CHANGE_POSSIBLE = 1 ist ein Richtungswechsel während einer Bewegung erlaubt.
Bei Notaus (Drücken des Drehencoders während einer Bewegung) erscheint die Portnummer im OLED-Display mit einer vorangestellten Tilde „~“, d.h. die DS steht ungefähr in der Nähe von Port x.
Die folgende OLED-Abbildung zeigt, dass die Drehscheibe ungefähr an Port 22 steht (hier in der Variante mit großer Schrift):

Während einer Bühnen-Fahrt wird in der untersten Zeile angezeigt, wo sich die Hausseite der Bühne gerade ungefähr befindet.
Ein langer Klick (> 1,5 s), während die Drehscheibe steht, löst einen U-Turn rechts (im Uhrzeigersinn, clock wise / CW) aus.
Poti
Das Potentiometer oder kurz Poti rastet in der Mittelstellung ein.
- Dreht man es nach rechts, bewegt sich die Drehscheibe im Uhrzeigersinn, dreht man es nach links, bewegt sie sich gegen den Uhrzeigersinn.
- Je weiter man das Poti aufdreht, desto schneller dreht sich die Bühne. Während der Drehbewegung wird der ungefähre aktuelle Port in der untersten Zeile dargestellt.
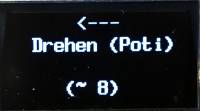
- Zurück in Mittelstellung stoppt sie wieder. Im OLED-Hauptbildschirm erscheint die Portnummer mit einer vorangestellten Tilde „~“, d.h. die DS steht ungefähr in der Nähe von Port x.
Falls kein Poti verwendet wird und keines angeschlossen ist, muss dass #define USE_POTI auf 0 gesetzt werden, sonst kann es sein, dass die Drehscheibe unkontrolliert herumschleicht.
DCC
Bei Ansteuerung der Drehscheibe über DCC und Aktivierung des Märklin-Modus mit #define DCC_MAERKLIN_7687_COMPATIBLE 1 entscheidet die DCC-Richtung über die Drehrichtung der Bühne.
Von der Zentrale bzw. einer entsprechenden PC-Modellbahnsteuerungssoftware (z.B. Traincontroller) wird zunächst die Richtung als DCC-Kommando gesendet und anschließend die Portposition bzw. Durchführung eines U-Turns. Die DCC-Richtung wird in der oberen Statuszeile angezeigt (Pfeil) und gespeichert. Sendet die Zentrale nur einen Fahrbefehl, wird die gespeicherte DCC-Richtung verwendet.
Falls DCC nicht genutzt wird (#define USE_DCC 0) oder der Märklin-Modus deaktiviert ist (#define DCC_MAERKLIN_7687_COMPATIBLE 0), wird kein DCC-Richtungspfeil im Hauptbildschirm bei Stillstand der Drehscheibe angezeigt. Bei DS-Bewegungen wird ein Pfeil angezeigt, der der realen Bewegungsrichtung entspricht.
Weitere Infos über DCC-Anbindung sind hier zu finden: LocoTurn-Ansteuerung über DCC und PC-Steuerungsprogramme
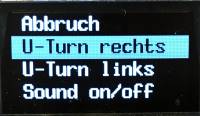
Menü
Über das Menü (Menüsteuerung) kann eine 180°-Drehung CW / U-Turn rechts oder CCW / U-Turn links ausgelöst werden.
 Weitere Bewegungen über das Menü sind nicht möglich.
Weitere Bewegungen über das Menü sind nicht möglich.
Taster
Die 4 Taster auf der Panelplatine lassen sich mit unterschiedlichen Aktionen belegen, z.B. mit U-Turns, Fahrt zu einer Home-Position etc. Details sind hier zu finden: Verwendung der Taster auf der Panelplatine
Serieller Monitor
Im seriellen Monitor der Arduino-IDE können diverse Drehscheibenbewegungen ausgelöst werden: Kommandos für den seriellen Monitor
Der serielle Monitor in der Arduino-IDE muss auf 9600 Baud eingestellt sein.
Im echten Betrieb auf der Anlage sollten alle Ein- und Ausgaben über den seriellen Monitor abgeschaltet werden; es ist schließlich i.d.R. kein PC angeschlossen. Für Testzwecke und beim Einrichten der Drehscheibe ist der serielle Monitor jedoch sehr hilfreich, insbesondere für Debugging.
Typischer Bewegungsablauf
Der Bewegungsablauf (mit eingeschaltetem Sound) ist folgendermaßen:
- Warnleuchte und Sound (Hupe) starten
- Die LED „Drehscheibe steht“ bzw. der Optokoppler für die Schnittstelle zur PC-Steuerungssoftware wird ausgeschaltet
- Signale blenden auf rot über, bzw. werden bei MLL-Betrieb auf rot gestellt
- Motor läuft an, ein entsprechendes Anlaufgeräusch ertönt
- Drehscheibe beschleunigt sanft und startet die Drehung, das typische Fahrgeräusch wird abgespielt
- Während der Drehung wird am OLED der ungefähre Port angezeigt, wo sich die Bühne gerade befindet
- Weiterhin blinkt die Status-LED (= built-in LED des Nano), solange sich die Bühne bewegt
- Am Zielport bremst die Bühne ab (bei ADVANCED_SOUND 1 wird bei entsprechenden Soundfiles ein Abbremsgeräusch abgespielt) und bleibt stehen
- Die Signale überblenden entsprechend der Bühnenstellung auf weiß bzw. rot und die Warnleuchte wird ausgeschaltet
- Es ertönt ein erneutes Hupen